
This tutorial is part of a series on Simultaneous Localization and Mapping (SLAM) using the extended Kalman filter. See the following for other tutorials in the series:
- Introduction
- Step 0: Introducing the Dataset
- Step 1: Localization With Known Correlation
- Step 3: SLAM With Known Correlation
- Step 4: SLAM With Unknown Correlation
This tutorial will build incrementally on the previous tutorial: Localization With Known Correlation. We’re still just doing localization, which means the robot starts with a map of landmarks that does not change over the course of its run. The difference is this time when the robot gets a range and bearing measurement, it will not know to which landmark that measurement corresponds.
{kind=link}
In this tutorial I will explain the process for estimating the correspondence between measurements and landmarks and present the correspondence algorithm on its own. Then I will show how the correspondence estimation algorithm can be integrated with the EKF localization algorithm introduced in the prior tutorial. As before, we’ll be using the UTIAS dataset for demonstration purposes.
Measurement Correspondence Intro
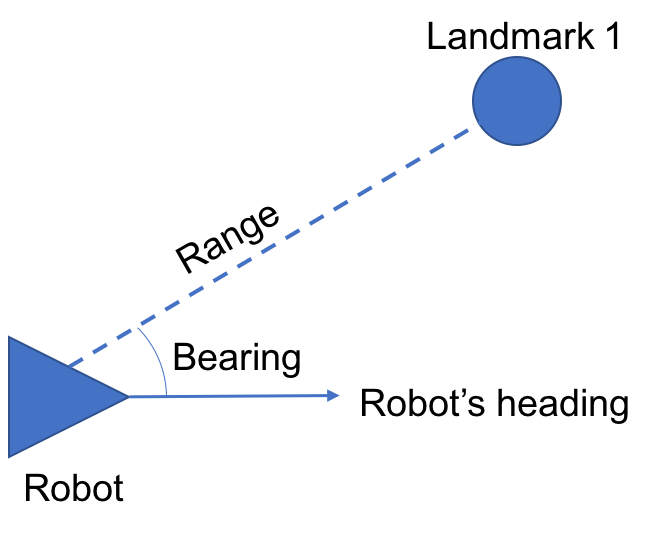
When our robot gets a measurement to a nearby landmark it can use that information to refine its estimate of its pose. In the last tutorial, each measurement received by our robot was in the form of ![z_t^i = [r_t^i\ \phi_t^i\ s_t^i]^T](https://i0.wp.com/andrewjkramer.net/wp-content/ql-cache/quicklatex.com-2748ddc649f7f00566bd0e4f698c3cd3_l3.png?resize=114%2C20 "Rendered by QuickLaTeX.com") where
where  is the measurement to landmark
is the measurement to landmark  at time
at time  . This vector contains the range
. This vector contains the range  , bearing
, bearing  , and, crucially, identity of the landmark being measured
, and, crucially, identity of the landmark being measured  . This could be interpreted as “landmark
. This could be interpreted as “landmark  is
is  meters away, at a bearing of
meters away, at a bearing of  radians.”
radians.”
In our current problem, the measurement vector will be ![z_t^i=[r_t^i\ \phi_t^i]^T](https://i0.wp.com/andrewjkramer.net/wp-content/ql-cache/quicklatex.com-5c2c2413b6a0bc6a72e04a501e2ac888_l3.png?resize=94%2C20 "Rendered by QuickLaTeX.com") . So we are no longer directly telling the robot to which landmark each measurement corresponds. Without knowledge of this correspondence measurements are basically useless to our robot. Sure, it knows the location of a landmark relative to its own location. But without knowing where that landmark is in the world it can’t use that information to refine its estimate of its pose.
. So we are no longer directly telling the robot to which landmark each measurement corresponds. Without knowledge of this correspondence measurements are basically useless to our robot. Sure, it knows the location of a landmark relative to its own location. But without knowing where that landmark is in the world it can’t use that information to refine its estimate of its pose.
So our robot needs a way to estimate the correspondence between its measurements and the landmarks in its map. One way it can do this is through maximum likelihood data association.
Maximum Likelihood Data Association
In maximum likelihood data association, as presented in section 7.5.2 of Probabilistic Robotics, the robot computes the probability that its current measurement corresponds to every landmark in its map. It then chooses the landmark with the highest probability of correspondence and assumes it is the correct association. This can be written as

In other words, given the robot’s past measurement correspondences  , map
, map  , past measurements
, past measurements  , and past control inputs
, and past control inputs  , which landmark has the highest probability of producing measurement
, which landmark has the highest probability of producing measurement  ?
?
In practice we find this by calculating the expected measurement and measurement covariance for every landmark in the map. We can then use these to calculate the measurement probability for every landmark and then select the landmark with the highest probability. The algorithm goes as follows:
![\begin{align*} \text{for all}&\text{ measurements } z_t^i=[r_t^i\ \phi_t^i]^T \text{ do} \\ \text{for}&\text{ all landmarks } k \text{ in the map } m \text{ do} \\ &q = (m_{k,x} - \bar{\mu}_{t,x})^2 + (m_{k,y} - \bar{\mu}_{t,y})^2 \\ &\hat{z}_t^k = \begin{bmatrix} \sqrt{q} \\ \text{atan2}(m_{k,y}-\bar{\mu}_{t,y},\ m_{k,x}-\bar{\mu}_{t,x})-\bar{\mu}_{t,\theta} \end{bmatrix} \\ &H_t^k = \begin{bmatrix} -\frac{m_{k,x}-\bar{\mu}_{t,x}}{\sqrt{q}} & -\frac{m_{k,y}-\bar{\mu}_{t,y}}{\sqrt{q}} & 0 \\ \frac{m_{k,y}-\bar{\mu}_{t,y}}{q} & -\frac{m_{k,x}-\bar{\mu}_{t,x}}{q} & -1\end{bmatrix} \\ &S_t^k = H_t^k \bar{\Sigma}_t [H_t^k]^T + Q_t \\ \text{end}&\text{for} \\ j(i) &= \text{argmax}_k\ \text{det}(2\pi S_t^k)^{-\frac{1}{2}} \text{exp}\{-\frac{1}{2}(z_t^i-\hat{z}_t^k)[S_t^k]^{-1}(z_t^i-\hat{z}_t^k)^T\}\\ \text{endfor}& \end{align*}](https://i0.wp.com/andrewjkramer.net/wp-content/ql-cache/quicklatex.com-64e1846930d8c3fb71680afa0184f6e8_l3.png?resize=509%2C311 "Rendered by QuickLaTeX.com")
The end result  is the estimated correspondence
is the estimated correspondence  for each measurement . It should be noted that the probability estimates are conditioned on past correspondences. However, this method assumes that the past estimates are correct. This means that the correspondence estimates are very sensitive to incorrect associations; incorrect estimates are likely to remain incorrect on subsequent measurements. This makes the maximum likelihood method brittle and likely to diverge when measurements are incorrectly associated.
for each measurement . It should be noted that the probability estimates are conditioned on past correspondences. However, this method assumes that the past estimates are correct. This means that the correspondence estimates are very sensitive to incorrect associations; incorrect estimates are likely to remain incorrect on subsequent measurements. This makes the maximum likelihood method brittle and likely to diverge when measurements are incorrectly associated.
There are alternative methods that are more robust to incorrect associations. Multi-Hypothesis Tracking is one of these, but the maximum likelihood method is the simplest. For an introduction I think the maximum likelihood method is sufficient.
The Complete Algorithm
The code for the complete algorithm is shown below. It is the same as the code for EKF localization with known correlation with the addition of the maximum likelihood algorithm for measurement correspondence (lines 85 to 120). Note also that the code rendering program I’m using doesn’t seem to handle MATLAB code very well, and some of the highlighting is a little messed up.
addpath ../common;
deltaT = .02;
alphas = [.2 .03 .09 .08 0 0]; % motion model noise parameters
% measurement model noise parameters
sigma_range = .43;
sigma_bearing = .6;
Q_t = [sigma_range^2 0;
0 sigma_bearing^2];
n_robots = 1;
robot_num = 1;
n_landmarks = 15;
[Barcodes, Landmark_Groundtruth, Robots] = loadMRCLAMdataSet(n_robots);
[Robots, timesteps] = sampleMRCLAMdataSet(Robots, deltaT);
% add pose estimate matrix to Robots
Robots{robot_num}.Est = zeros(size(Robots{robot_num}.G,1), 4);
start = 1;
t = Robots{robot_num}.G(start, 1);
% need mean and covariance for the initial pose estimate
poseMean = [Robots{robot_num}.G(start,2);
Robots{robot_num}.G(start,3);
Robots{robot_num}.G(start,4)];
poseCov = 0.01*eye(3);
measurementIndex = 1;
% set up map between barcodes and landmark IDs
codeDict = containers.Map(Barcodes(:,2),Barcodes(:,1));
while (Robots{robot_num}.M(measurementIndex, 1) < t - .05)
measurementIndex = measurementIndex + 1;
end
% loop through all odometry and measurement samples
% updating the robot's pose estimate with each step
% reference table 7.3 in Probabilistic Robotics
for i = start:size(Robots{robot_num}.G, 1)
theta = poseMean(3, 1);
% update time
t = Robots{robot_num}.G(i, 1);
% update movement vector
u_t = [Robots{robot_num}.O(i, 2); Robots{robot_num}.O(i, 3)];
rot = deltaT * u_t(2);
halfRot = rot / 2;
trans = u_t(1) * deltaT;
% calculate the movement Jacobian
G_t = [1 0 trans * -sin(theta + halfRot);
0 1 trans * cos(theta + halfRot);
0 0 1];
% calculate motion covariance in control space
M_t = [(alphas(1) * abs(u_t(1)) + alphas(2) * abs(u_t(2)))^2 0;
0 (alphas(3) * abs(u_t(1)) + alphas(4) * abs(u_t(2)))^2];
% calculate Jacobian to transform motion covariance to state space
V_t = [cos(theta + halfRot) -0.5 * sin(theta + halfRot);
sin(theta + halfRot) 0.5 * cos(theta + halfRot);
0 1];
% calculate pose update from odometry
poseUpdate = [trans * cos(theta + halfRot);
trans * sin(theta + halfRot);
rot];
poseMeanBar = poseMean + poseUpdate;
poseCovBar = G_t * poseCov * G_t' + V_t * M_t * V_t';
% get measurements
[z, measurementIndex] = getObservations(Robots, robot_num, t, measurementIndex, codeDict);
% remove landmark ID from measurement because
% we're trying to live without that
z = z(1:2,:);
% if features are observed
% loop over all features and compute Kalman gain
if z(1,1) > 0.1
for k = 1:size(z, 2) % loop over every observed landmark
% loop over all landmarks and compute MLE correspondence
predZ = zeros(n_landmarks, 1, 2); % predicted measurements
predS = zeros(n_landmarks, 2, 2); % predicted measurement covariances
predH = zeros(n_landmarks, 2, 3); % predicted measurement Jacobians
maxJ = 0;
landmarkIndex = 0;
for j = 1:n_landmarks
xDist = Landmark_Groundtruth(j, 2) - poseMeanBar(1);
yDist = Landmark_Groundtruth(j, 3) - poseMeanBar(2);
q = xDist^2 + yDist^2;
% calculate predicted measurement
predZ(j,:,:) = [sqrt(q);
conBear(atan2(yDist, xDist) - poseMeanBar(3))];
% calculate predicted measurement Jacobian
predH(j,:,:) = [-xDist/sqrt(q) -yDist/sqrt(q) 0;
yDist/q -xDist/q -1];
% calculate predicted measurement covariance
predS(j,:,:) = squeeze(predH(j,:,:)) * poseCovBar ...
* squeeze(predH(j,:,:))' + Q_t;
% calculate probability of measurement correspondence
thisJ = det(2 * pi * squeeze(predS(j,:,:)))^(-0.5) * ...
exp(-0.5 * (z(:,k) - squeeze(predZ(j,:,:)))' ...
* inv(squeeze(predS(j,:,:))) ...
* (z(:,k) - squeeze(predZ(j,:,:))));
% update correspondence if the probability is
% higher than the previous maximum
if thisJ > maxJ
maxJ = thisJ;
landmarkIndex = j;
end
end
% compute Kalman gain
K = poseCovBar * squeeze(predH(landmarkIndex,:,:))' ...
* inv(squeeze(predS(landmarkIndex,:,:)));
% update pose mean and covariance estimates
poseMeanBar = poseMeanBar + K * (z(:,k) - squeeze(predZ(landmarkIndex,:,:)));
poseCovBar = (eye(3) - (K * squeeze(predH(landmarkIndex,:,:)))) * poseCovBar;
end
end
% update pose mean and covariance
poseMean = poseMeanBar;
poseMean(3) = conBear(poseMean(3));
poseCov = poseCovBar;
% add pose mean to estimated position vector
Robots{robot_num}.Est(i,:) = [t poseMean(1) poseMean(2) poseMean(3)];
% calculate error between mean pose and groundtruth
% for testing only
%{
groundtruth = [Robots{robot_num}.G(i, 2);
Robots{robot_num}.G(i, 3);
Robots{robot_num}.G(i, 4)];
error = groundtruth - poseMean;
%}
end
animateMRCLAMdataSet(Robots, Landmark_Groundtruth, timesteps, deltaT);