
{kind=link}

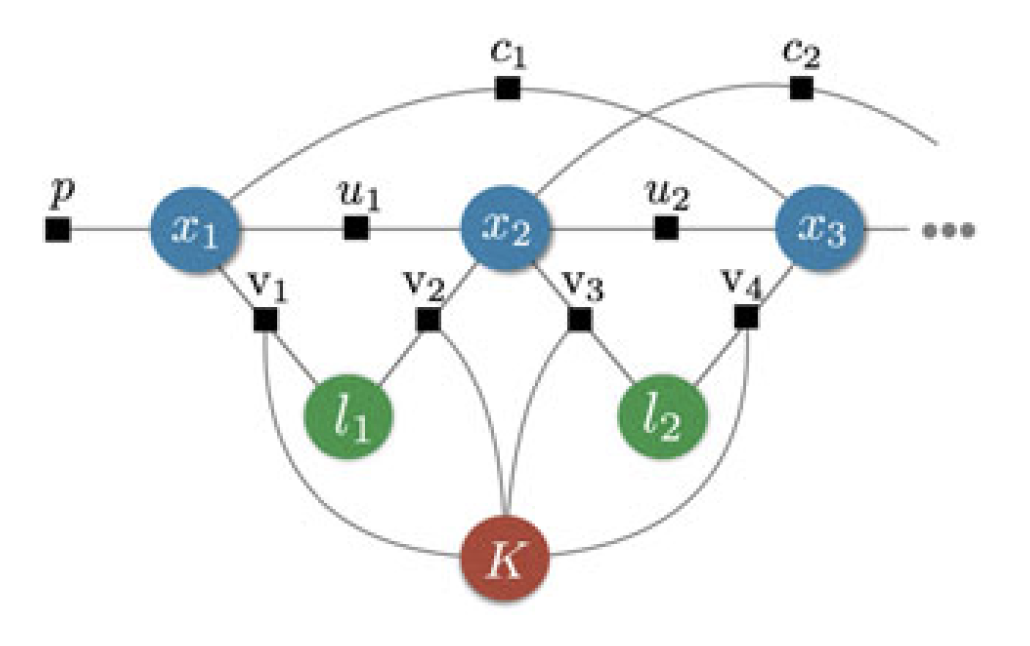
SLAM factor graph example: Blue circles denote robot poses at consecutive
time steps (x1, x2 , . . .), green circles denote landmark positions (l1 , l2 , . . .), red
circle denotes the variable associated with the intrinsic calibration parameters
(K). Factors are shown as black squares: the label “u” marks factors corresponding
to odometry constraints, “v” marks factors corresponding to camera
observations, “c” denotes loop closures, and “p” denotes prior factors. Taken from Cadena et al, 2016.